
Brushless Motor Kv Rating Explained
Brushless Motor Kv is one of the most important factors and variables in efficiency calculation, craft agility, it’s purpose, props dimension calculation, flight time, thrust, etc. In theory, motor kV is increase of rotor rotations per minute (RPM) when the voltage is increased by 1V when running without any load.
SIZE AT FIRST
Brushless DC motors in the RC world are marked with a 4- digit number: XXYY “XX” part is referring to the stator width and “YY” to stator height. The torque depends on those two parameters- the wider and higher it is, the motor is more capable of making a higher torque.
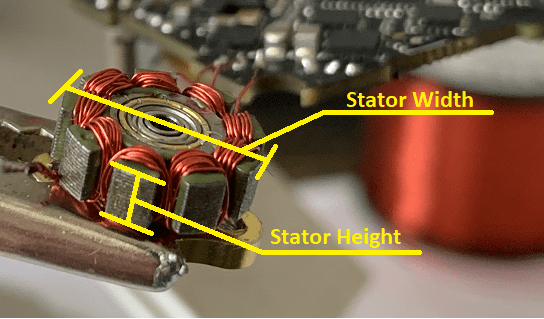
On 5” crafts, you’ll, most often, see 2205, 2206, etc marking. Those markings don’t include the rotor, only the stator, as shown in the photo below.
Motors are usually marked with dimensions and Kv together so a typical mark on the motor would look like “2206/2300”. The second number is referring to the Kv rating of the motor.
Whether you are using brushed or brushless motors, the principle of electromagnetism is at the root of your motors functionality. An electromagnet in a drone motor is made up of a metal core of copper windings which can be activated and deactivated by passing electric current through it.
BRUSHLESS MOTOR KV RATING
Theoreticly KV represents the speed at which the motor rotates for every volt applied to the motor.
For example, if we used 4s (14.8V) to power 2300Kv motor, the maximum number of motor rotations would be approximately 2300×14.8=34040RPM. To simplify it, we didn’t include some factors which would spark interest only in nerds and engineers (so, sorry, geeks, we won’t mention them here- this is perfectly enough for understanding the calculation).
In theory and ideal conditions, that would be 34040 RPM without any load. In reality, there will always be some load- in the RC world, that would be props and, due to the air resistance, the motor won’t be able to reach that RPM, it will always be a bit lower.
Motors with a higher Kv rating will be able to rotate the propeller faster. That means those with a lower Kv rating won’t be able to do it as fast, but their torque will be higher. That’s exactly why it’s advised to have larger props combined with low Kv motors. Higher Kv motors will be more efficient with higher RPM but at a cost of the torque.

Let’s step away from the ideal conditions and the theory. Spoiler alert- now it gets complicated.
Kv is no indicator of the power of the motor, how high current can it handle of how efficient it is!
You should stick to thrust tests when dealing with the mentioned calculations.
In-depth; when you move a magnet near a copper wire, electricity is created in the form of voltage. That means when the motor is rotating, it creates a back EMF and it can be measured in Volts. It’s best to view the Kv as a motor constant. If you rotate the motor (its rotor), it will generate 1V voltage per certain number of rotations. The reference RPM is the one when 1V was generated.
So, if the motor is generating 1V of a back EMF per 2500RPM, we know have a 2500Kv motor on our hands. If a motor is generating 1V per 1650RPM, its Kv rating is exactly 1650Kv. This is how you can calculate the Kv rating of any brushless motor in the RC world, and it’s quite simple. All you need to do is measure the correct RPM and the voltage.
Overloading motor is common cause of stator burnout. If you load your drone more than the props can lift, the motor will heat up and cause internal isolation melting. In this tutorial we explain how to rewire brushless motor caused by windings burnout and save you the costs of buying a new one.

MOTOR TORQE
When talking about the Kv of the motor, we must mention the connection between Kv and the torque- depend on each other.
Kv will help us calculate the current the motor needs to reach a certain torque level. The torque- Kt is (to simplify it) a constant inverse to the Kv. The higher Kv, the lower Kt is.
The current, torque, and Kv are closely related. Motors with lower Kv need lower current to rotate larger prop and that’s why their torque (Kt) is higher, but aren’t as efficient with RPM increase. And vice versa: motors with higher Kv need higher current to rotate larger props, but their efficiency increases with RPM increase.
To make it short and simple: motors with higher Kv need more current than motors with lower Kv to get the same torque.
IS HIGHER KV BETTER?
When we’ve explained what brushless motor Kv rating is, what’s the relationship between Kv ad the torque i.e. prop size, it’s clear the higher Kv doesn’t always mean better. It’s just the constant indicating motor’s RPM per 1V voltage.
CANDY FOR NERDS (CONCLUSION)
- The higher voltage means higher RPM, but also higher current. Current too high and you’ll cook your motor.
- The torque is directly proportional to the current.
- The current drain is the highest when RPM is lower (at full throttle) and it’s approaching zero when RPM is max. You get max RPM by multiplying Kv to battery voltage. The faster the motor rotates,it drains less current. When considering that rotating it too slowly will also cook the motor.
- Bigger prop diameter or prop pitch means heavier load which makes the motor slower. The goal is to use the prop which accelerated the motor enough for a current to be low enough not to cook it. That is if you want a formula for maximum power.
- C-rating of a battery must be high enough to deliver the current to the motor. The result of C*mAh*0.5 must be higher than the current the motor is draining.
- ESC must be able to handle more current in A than the motor can drain. It would be ideal to use the 0.75 factor in the calculation- so 40A ESC would be enough for 30A motor.

Author: Davor Kustec
- Drone Pipeline Inspections in Oil and Gas Industry - November 23, 2023
- Wind Turbine Inspection using Drones - November 16, 2023
- Agriculture Drone Mapping: Data-Driven Decisions - October 29, 2023