
How to Build a Micro FPV Quad With HD Cam in 8 Easy Steps
This micro build guide has two objectives, one is to build a quad from scratch and second is to teach a total beginner how to tune and fly the quad he just built. The goal is smoothness, safety and being able to fly through small gaps while shooting at 1080p 60fps with near GoPro quality.
Micro drones are all the hype of late in the drone community. They are agile and nimble and because of their small size they can fly through tight spaces, which was previously not possible with a standard sized (5”or 6”) drone. Let’s dive in:
PARTS OVERVIEW
We have selected a list of parts that we think would work really well, keeping beginners in mind. These parts require very minimal soldering, though soldering cannot be totally avoided.
If you are not sure and confident enough in your soldering skills, do not attempt to solder the FC. I repeat again, with no prior experience in soldering do not attempt this build.
Micro quads are excellent way to get started into FPV and learn various maneuvers. It’s a lot easier to pick up some stick time with small brushless quad where you can’t hurt anyone around you while practicing. In the guide we feature Best Micro FPV Drone that will get you started.

If you’re just starting out and want to learn the basics then BetaFPV CetusPro Kit is perfect fot a beginner. You can slowly start learning LOS flying then progress to FPV.
Frame – Exuav 90mm
Frames are the skeleton of a quad that provides support for the components to be mounted and one of the most important aspects in building a quad is to select a suitable frame. Since this guide is beginner oriented and with beginners crashing or bumping into stuff more often and breaking the propellers, we wanted the frame to be durable and most importantly protect the propellers.

The EXUAV 90mm is a 90mm wheelbase (diagonal motor to motor distance) frame. The top and bottom plates are 1.5mm thick, which are plenty durable considering their size.
The propellers are enclosed within the frame, meaning you cannot break your propellers easily and not hurt people accidentally during the learning process.
Motors – T motor F15 1106
Next comes the brushless motors, power house for the quad. A well built quad has is neither overpowered nor underpowered motors and the 1106 sized motors were the ideal candidate. Cheaper motors are poorly made and tend to wear out faster than the more expensive ones.

The T-Motor F15 1106 motors are manufactured by one of the most popular brand in the drone industry. A cheaper alternative would be the Racerstar 1106 motors, but we suggest buying a few more of those cheaper ones, cheaper motors are made of low quality components and tend to wear out faster, just in case.
FC and ESC- HGLRC F4 Zeus AIO
We needed an AIO Flight controller (FC) integrated with an Electronic speed controller (ESC), not only to allow for simpler wiring but to reduce the overall weight. The FC should be able to run the modern Betaflight firmware and the ESC should handle the current draws from our motors.

The HGLRC F4 Zeus is an AIO FC integrated with an ESC. Even though the FC is running a F4 FC, it performs exceptionally well.
The ESC is rated for 15A, our motors have a continuous current draw of 12A max, with a burst rating of 25A for 10 seconds. The Zeus even has a black box to record your flight performance.
Considering its small size and the wide of receivers supported by the Zeus, it was the ideal pick.
FPV Camera- Caddx Firefly
Since the plan is to reduce the weight, the FPV camera had to be just as lightweight. Not a lot of cameras are available in this size. The Runcam nano is a good candidate but requires an external Video transmitter (VTX). The bulky external VTX and weight gains were unreasonable in our build, after a while of searching we found a fantastic AIO FPV camera, the Caddx Firefly.

The Caddx has quite impressive features, boasting a 48CH and a 1/3rd inch 1200 TVL image sensor. The camera can be bought in NTSC or PAL and 4:3 or 16:9 image formats, with a collective weight of both the camera and VTX just under 5g.
Propellers
Propellers screw onto the motors and help convert the rotation from the motors into useful thrust by moving air. This thrust is used to lift the quad off the ground and fly. A well made propeller may help reduce in-flight vibrations due to imbalance and increase the efficiency and flying times of the quad. Hence buying a good quad propeller is just as important.

The Emax Avans are 2” 4 blade propellers that are perfect for 11xx sized brushless motors. These propellers are made of Polycarbonate which makes them very durable and extremely rigid (do not tend to deform during flights and as a result reduce vibrations). Another cheaper alternative would be the DalProp cyclones, which are 2” 4 blades but come in 4 pair packs.
Receivers
One of the primary functions of a receiver is to receive the RF signal being transmitted from the TX and send it to the FC. If an RX is faulty and is not performing as expected, the quad might behave erratically and you may lose control over the quad. Another point to note is the size of the RX and the range (micro RX’s have limited range) that you fly the quad with.
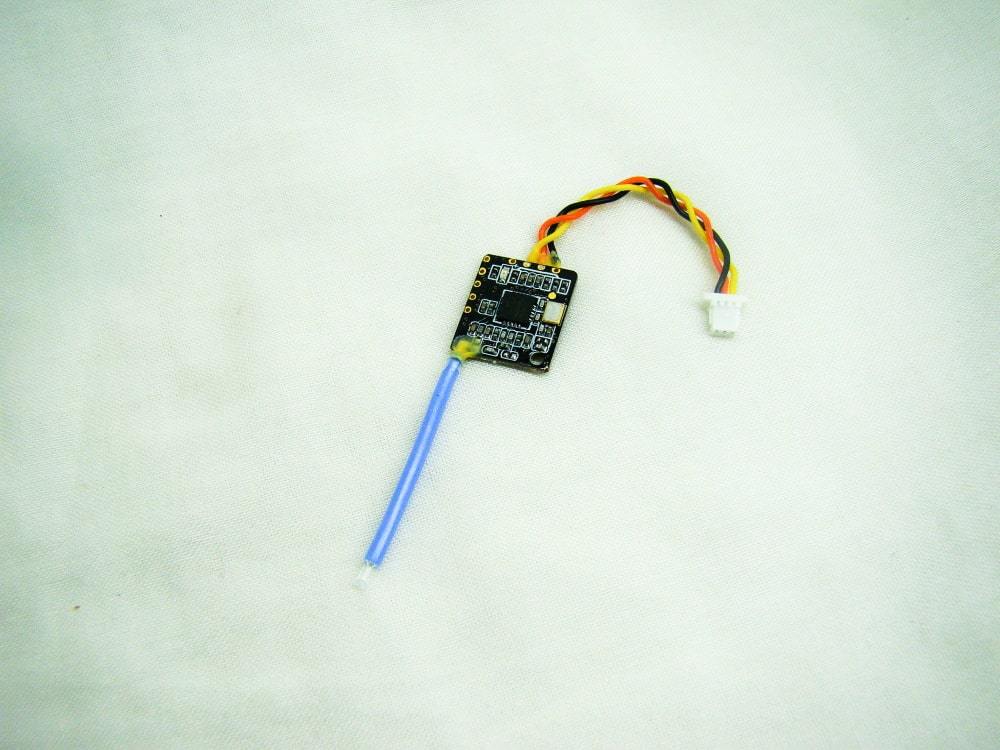
As the intended build is a micro quad, the quad also needs a micro RX. Depending on what TX you have, you buy the appropriate RX. Check these Flysky and FrSky receivers. Not only these RX’s, any micro RX for your respective TX would work great as long as you don’t venture far out (typically over a mile).
Batteries
LiPo Batteries provide the quad with energy to fly. Typically, quads use high discharge batteries. A good battery provides the current requirement of the quad while remaining within the safe operating limits. Our quad can take 2-3s batteries. 3s battery is the sweet spot, though 2s will feel underpowered and you may quickly outgrow 2s and will feel the need to upgrade soon enough.
The Tattu 3s 450mAh battery is small and can hold up to the abuses of the quad. Tattu is one of the premium battery manufacturers in the quad community. Another cheaper alternative would be the CNHL Multistar 3s 450mAh. This battery capacity will give a good 3-4 minutes of flying. You could fly with a 3s 550mAh battery but anything higher would be too big and bulky.
BUILD PROCESS
I cannot stress this enough, as mentioned earlier, without prior experience in soldering do not attempt this build!!! The soldering of these components requires patience and quite a bit of experience to get the job done. The solder tabs are so tiny that it is very easy to short circuit the FC and lose $55.
With some soldering experience and mediocre soldering skills, let’s get started with the build.
Step 1- Assembling the Frame

Putting together the frame should be pretty straight forward. The frame comes with 2 sets of screws that are used to put the frame together. The vertical standoffs are screwed in from the top and bottom securing the top and bottom plates.
There are 9 standoffs to screw in and try not to over tighten the screws as they may strip the standoffs. Using a drop of thread locking fluid helps it from vibrations.
The standoffs can be screwed in later as they may come in the way when soldering. So it might be much easier to mount the FC’s and all the other hardware and mount the top plate later.
Step 2- Mounting the FC/ESC
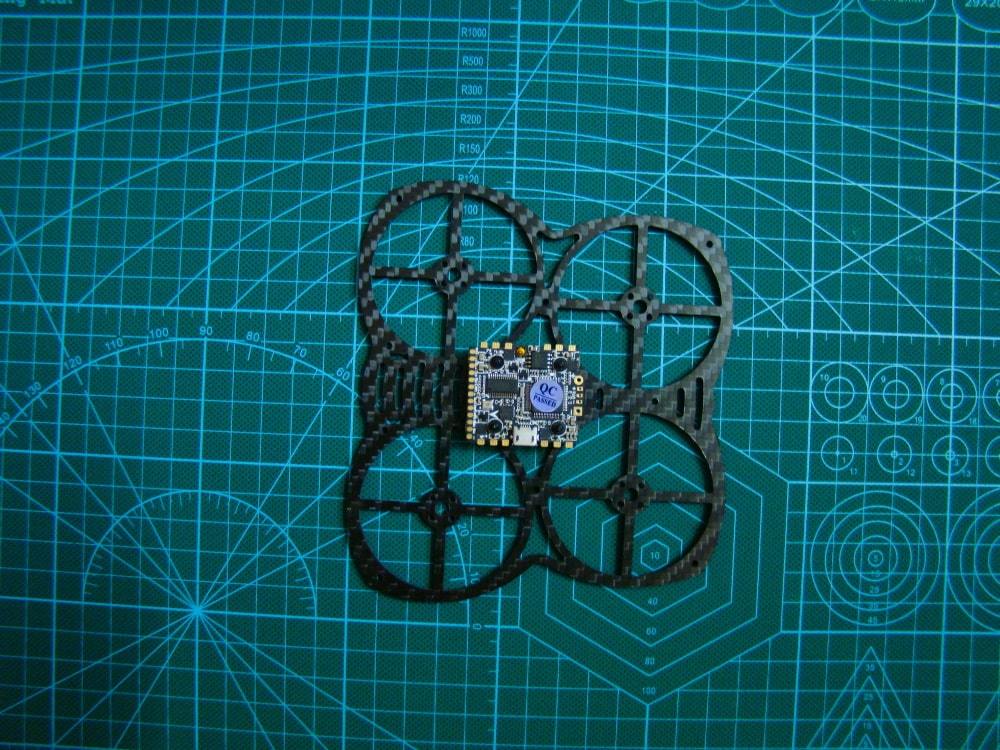
The bottom plate of the frame holds the FC/ESC and all the other electronics and hardware of the quad. The bottom plate has 4 holes (20x20mm apart), this is where the FC gets mounted. The FC does not come with the standoffs and we recommend you buy this box of nylon standoffs or any M2 nylon standoffs will work just fine.
Before screwing in the FC, another thing to take care of is the orientation of the FC. There is an arrow mark on the FC which indicates that it should be facing forward, always. There is another way to counter this beginner mistake (messed up orientation of the FC) in Betaflight, but we will stick with the basics for now.
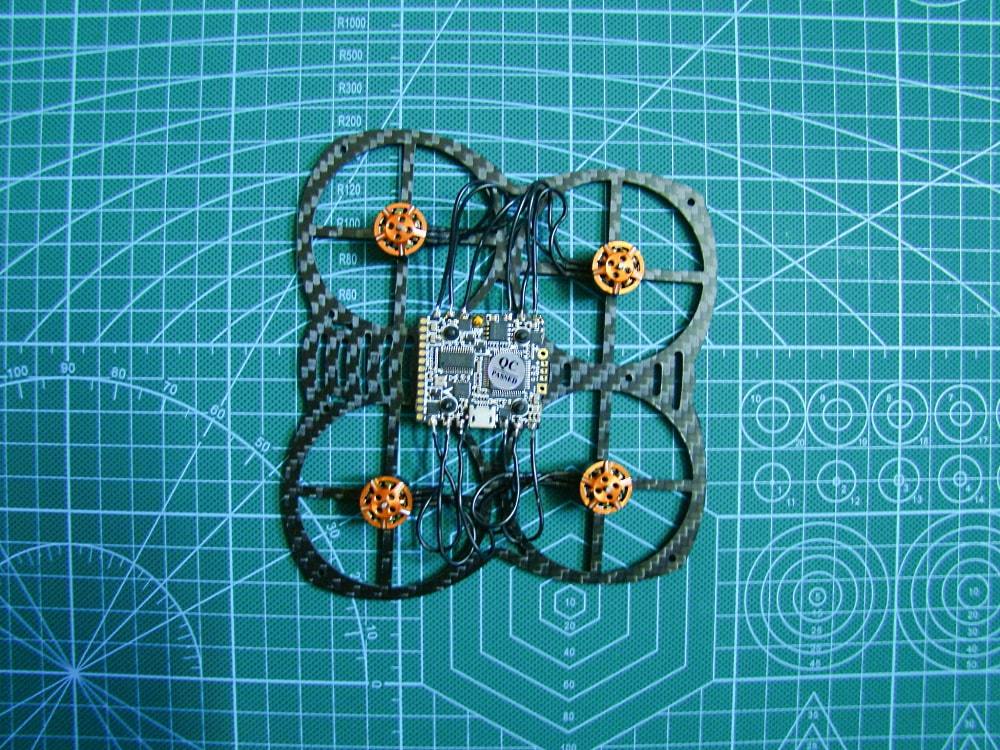
Step 3- Mounting the motors
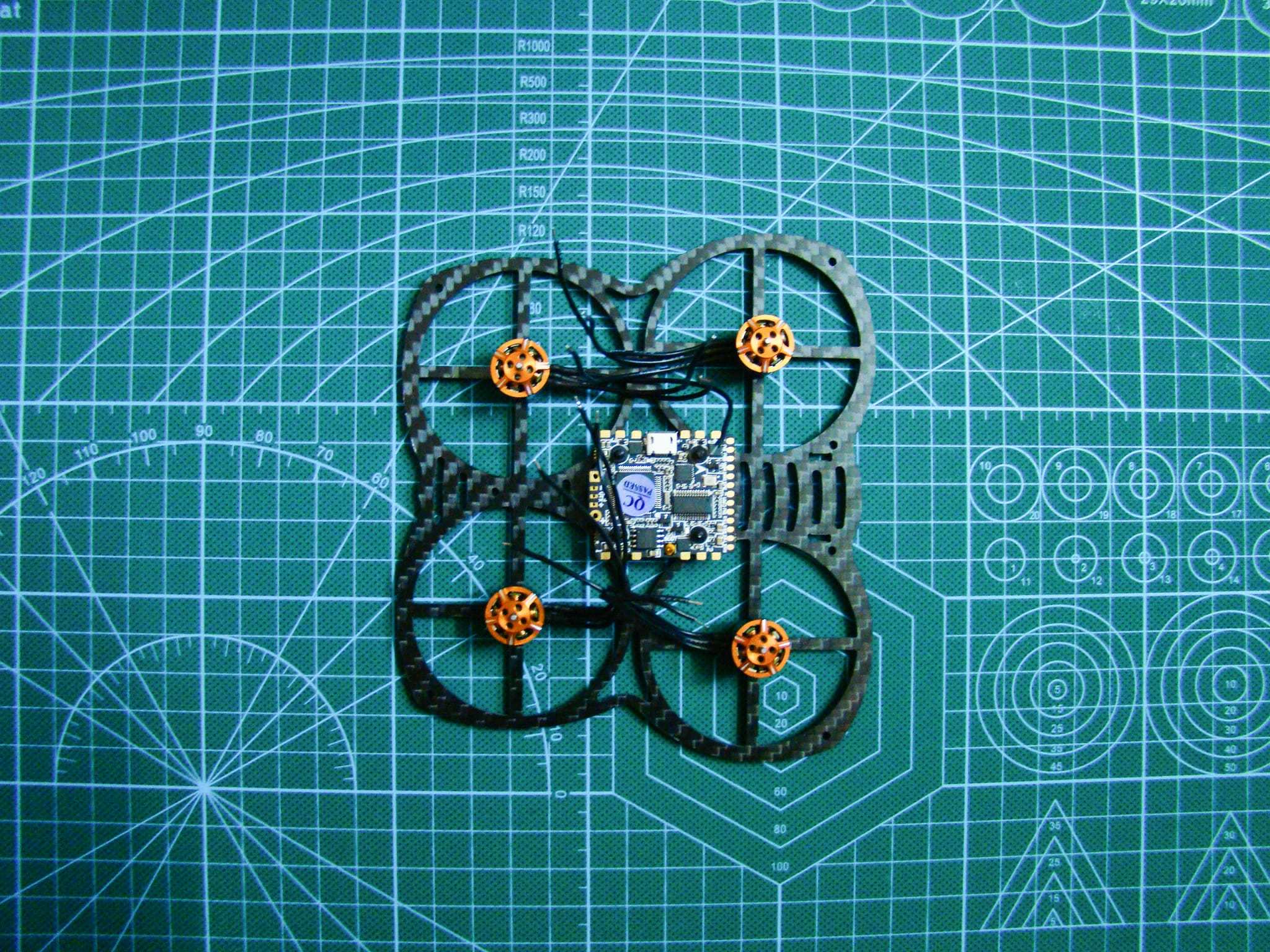
Mounting the motors is as simple as just screwing in the motor on the bottom plate with the screws that get provided with the motors. Again the orientation of the top and bottom plates is important. Only the bottom plate has holes for the motors and the top plate doesn’t.
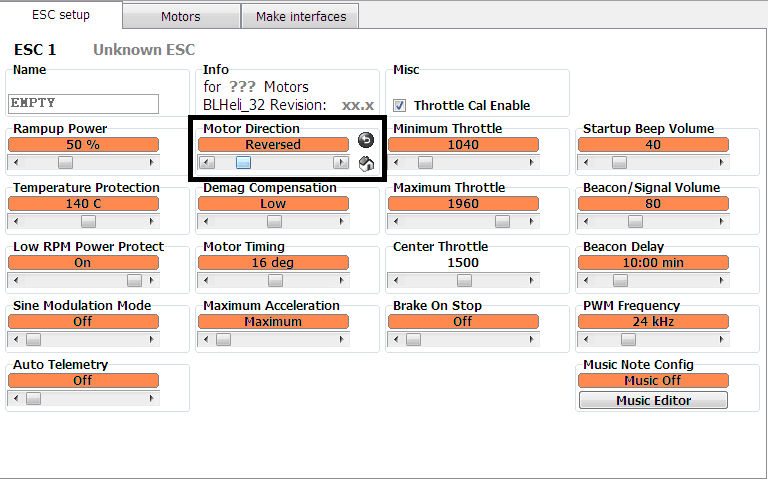
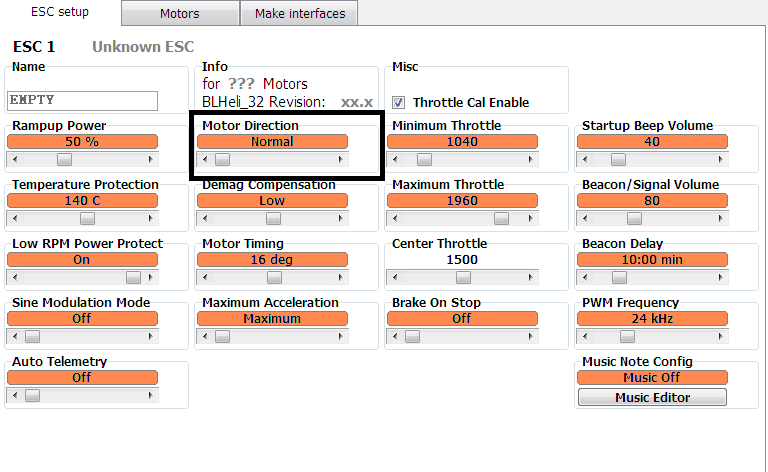
The orientation of the motors doesn’t matter, pick one and screw it in. The rotation of the motors can be controlled in BLHeli suite (as shown in the above picture).
Step 4- Soldering the motors
This is where it gets a little tricky, but fear not, with some courage and prior soldering experience you can get through this with ease. The FC has 4 sets of 3 copper tabs protruding on each corner of the FC. This is where the motors get soldered on.
As shown in the above figure, snip the wires accordingly to length leaving a little extra at the ends, and solder the motor wires to the FC motor tabs. Be careful while soldering as a single drop of excess solder dripping onto the FC can short the FC out and destroy it totally.
Step 5- Connecting to Betaflight
Now it is time to get to the software part of drone building. This is the fun part. First order of business is to flash the firmware (operating systems like Android in the quad world). Some FC’s come pre-flashed from the factory, but sometimes an update for the software might be released, it wouldn’t hurt to flash your new FC.
The power to run the FC comes directly from the USB, but if you intend to test run the motors then you might want to connect the battery.

First open the Betaflight software ( or download it from here, if you haven’t already installed it). Go to Betaflight flasher (third option on the left), select the board as Omnibus F4 and select the latest firmware.
You can do a full chip erase or not doesn’t matter either ways, and click on the Flash Firmware option and wait for a seconds and you are ready to rumble.
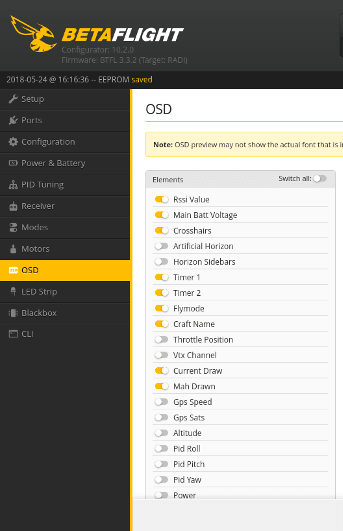
These articles cover in depth about Betaflight configuration and Betaflight OSD. You can customize various options and OSD (on screen display). OSD’s are basically flight parameters getting displayed along with your video feed. You can choose from a variety of parameters to be displayed such as battery voltage, current, flight time etc.., This is a totally personal choice and you can opt to display what parameters you want and hide all the unnecessary clutter.
Step 6 – Connecting FPV gear
After the completion of step 5 successfully, and the FC did not go up in flames, GOOD JOB!! It is now time to give the quad some vision. Soldering the FPV gear is pretty easy, we have 3 wires- positive (red wire), negative (black wire) and video (any other colored wire is video).
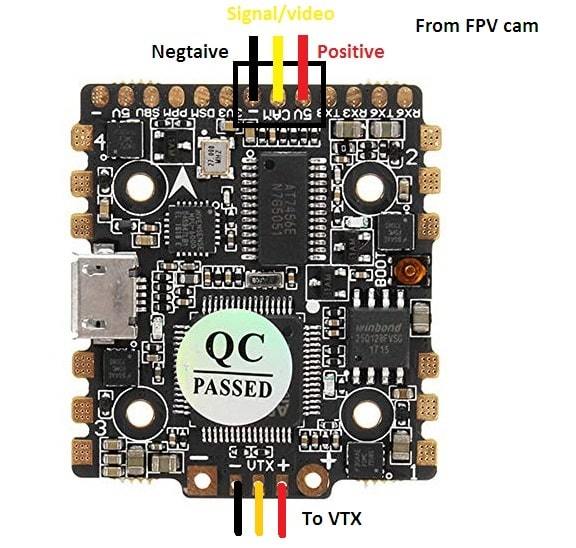
You might be wondering why send the video signals through the flight controller. The OSD parameter gets superimposed onto the video signal coming from the FPV camera and gets sent to the vTX to transmit.
Pick a vTX channel and leave it at that channel, we can find it from the FPV goggle’s receiver later on. Any frequency is fine if you fly alone, but if you have some friends then raceband or band C would be better.
Step 7- Mounting the propellers & Connecting the RX
Without these 2 components the quad is as good as dead. Without the propellers to provide thrust, the quad wouldn’t take off the ground and without the RX the FC wouldn’t know what to do and remain idle.
The motors come with the screws to mount the propellers. Insert the middle hole of the propeller into the shaft of the motor (it is meant to offer some resistance, force it through) and align the holes on either side of the motor’s holes to the propeller’s holes and screw it in, not too tight just tight enough. You might use a bit of thread locking fluid, but not be necessary.
Soldering the RX (receiver) is easy as well, with just 3 wires to connect- positive (red wire), negative (black wire) and video (any other colored wire is signal). Depending on what your transmitter is, you connect the appropriate RX pad and solder it. SBUS (Futaba and FrSky), PPM (Flysky) and DSM (Spektrum) transmitters have different solder tabs and must be soldered accordingly.

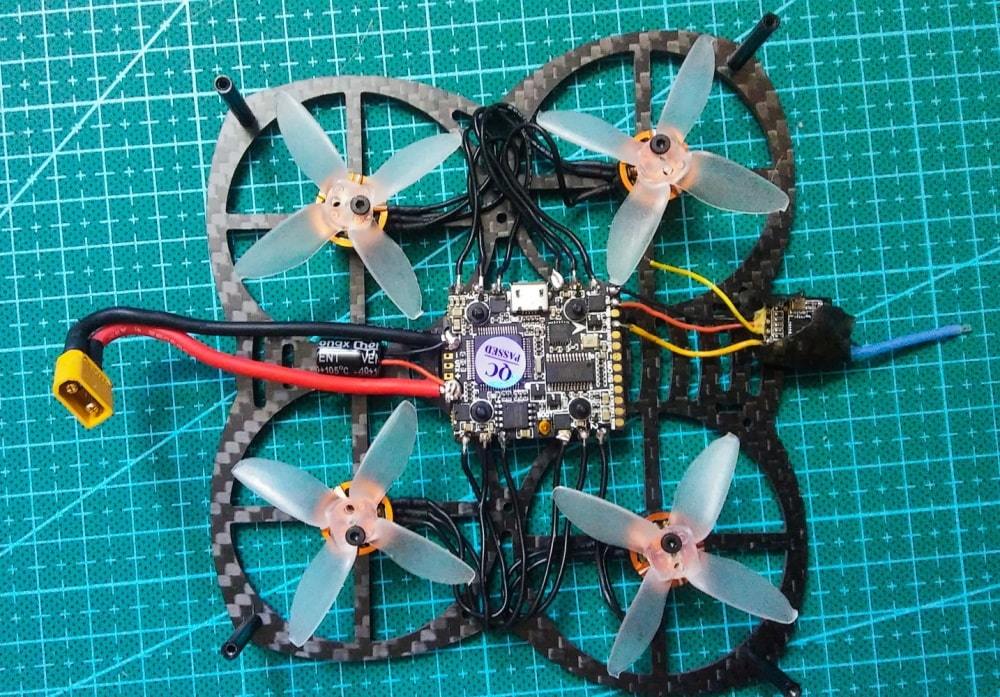
After soldering the RX and mounting the propellers, it is time to solder the battery tabs. Solder the XT30 tabs provided with the frame and solder it with the FC. The symbols ‘+’ for red wire and ‘–‘ for black wire on the FC.
Step 8- Tweaking and tuning
(To be updated after flying)
4. CONCLUSION
By now you must have a hang of building a quad and the various steps involved in it. As a beginner this may be overwhelming but it only gets easier with time and building. If you stick around this hobby for a while and it might be one of the most rewarding hobbies.

Author: Rakesh
- Drone Pipeline Inspections in Oil and Gas Industry - November 23, 2023
- Wind Turbine Inspection using Drones - November 16, 2023
- Agriculture Drone Mapping: Data-Driven Decisions - October 29, 2023