
Quadcopter Preflight Checklist & Tips – And Why it is Important
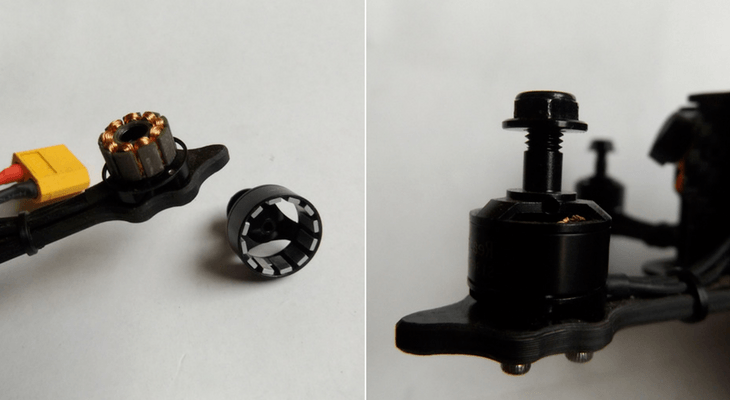
I have been inspired to write this preflight checklist because I am currently grounded after I failed to properly check over my newest micro quad, which annoyingly fell out of the sky 2 minutes into its maiden flight! I had done a few LOS (line of sight) high throttle punches (not full throttle though) to get a feel for the power, with no ill effects. Then I put my goggles on for the rest of my 1st pack, did a powerloop and on applying maximum throttle to arrest the descent and test out the speed, I think I got an oscillation which caused one of my motors to throw a bell housing.
On closer inspection there was not a single grub screw on any of the motors! I didn’t even bend a prop, but I am now grounded for the want of a $0.02 ‘C’ clip and a $1 motor shaft. Dammit!
Before we get into the article proper I will dedicate a short paragraph to propellers. Props are the drinking water of a race or freestyle quadcopter. Throughout your flying career you will probably bend, break or otherwise damage, on average, at least 1 prop every single session. Always keep as many spare props as you can, and as soon as your supply starts looking at all low, order more!
Given the way most of us fly (or crash) our mini quads, I will start with a list of the bits and pieces everyone should take out to the field, to try and keep your flying sessions as long and free from frustration as is possible!
I will then follow up with a list of the parts that are most commonly broken, which (ideally) you should keep spares of, and finally a more detailed checklist that beginners, and even more experienced pilots, can go over to ensure a new model is ready for its maiden flight. Sometimes ready-built craft or RTF (Ready To Fly) models are not as “ready” as their titles suggests!
Read More: FPV Racing Drones Recomended Parts
10 THINGS EVERYONE SHOULD TO BRING TO THE FLYING FIELD
So I will start with the obvious, but I’m sure someone has forgotten…
- Your Quadcopter
- Charged batteries
- Propellers & others spares (see below)
- Your Transmitter
- FPV Goggles or screen
- Micro SD Card to record your flights
- Action Camera / HD Camera (such as a Go-Pro)
- Hex nut driver / spanner to remove-replace props
- Motor grip tool, to make replacing props a bit easier
- Hex key or Allen / whatever is used to hold your frame together ( most standoffs use a Hex socket machine screw)
10 RECOMMENDED SPARE PARTS
The following, while not essential, is a list of some of the most likely components of your quadcopter to fail or break. You should keep spares, as it can take a long time for replacements to be delivered. I have mentioned props twice already, and while they are not featured in the list below, you should know by now that you NEED SPARE PROPS!!
- Motors. If you can afford it, buy a spare motor whenever you order a set. Replacing motors after a time can mean that there have been minor design revisions or different tolerances in the copper. Whatever, it’s best to order spare motors from the same batch.
- ESC’s. If you use individual ESC’s it helps to have a spare because they can fail.
- Antennas are usually quite exposed and as such can be vulnerable in a crash.
- Having a spare VTX might seem like a “prepper’s” overkill, but if your VTX antenna is pulled from the socket in a crash, this can cause the VTX to overheat and burn out, if the battery is not disconnected fast enough.
- Battery straps. The battery is the single heaviest component on your quad, given the high “G’s” your craft experiences in a crash, it is not uncommon for battery straps to break.
- Electrical / Insulation tape, cable ties / Zip ties & rubber bands. All handy for a temporary fix
- Lenses for your FPV camera / spare FPV camera. Flying proximity puts your camera right in the firing line when you misjudge a gap. Another annoying $5 part that can keep you grounded.
- A battery or gas powered soldering iron is the perfect tool for field repairs, and don’t forget a small amount of solder. Not exactly a spare part, but you might not be able to fit your spares in the field without it!
- Spare Arms. If you quadcopter is designed with removable arms, it is a good idea to keep one or 2 spare as this is the most likely part of your frame to suffer damage.
- Standoffs – Alu standoffs are unlikely to break, as are the nylon ones used in the stack, however if one of the nylon standoffs does break, then your FC will probably experience a lot of vibration which will affect flight performance. While an Alu standoff is unlikely to break, you may experience a stripped thread which means your frame might not hold together properly. Any crashes while the nuts, bolts & screws securing the frame are loose will put additional strain on the mounts and could damage the CF making the frame unflyable.
Remember if you have carried out temporary field repairs, you should relax your flying style a bit for the remainder of the session. Temporary fixes are exactly that – Temporary!
3 QUICK PREFLIGHT CHECKS
This is the preflight checklist for models that are already in service
- Propellers – I recommend that you don’t attach your props until you are ready to fly, props that are attached to your model can bend or break more easily in transport. Balance your props before you get to the field, stringing or bagging CW and CCW props together makes it easy to find the direction you require. Before fitting, give your props a visual check for damage and make sure they are unbent.
- Motors – Make sure that your motors are clean, that there is no sand or grit between the stator and rotor magnets. Make sure that the prop shaft is unbent and that the propeller blades turn “true” and remain level.
- Screws – Make sure that all screws are in place and tightened, any that have loosened, check, remove and re-apply thread locker. Check motor grub and mounting screws, and all the nuts, bolts and standoffs that keep the frame together. Also check the nylon standoffs used in the stack. Just because “it flew fine last time”, that doesn’t mean that nothing has been vibrated loose!
Your quad is a lady and she must be looked after. If you don’t check her Propellers, Motors and Screws (or PMS) she might get grumpy!
NEW MODEL PREFLIGHT CHECKLIST
New prebuilt or RTF models should have all the components fitted and tightened, minus the battery on BNF (Bind and Fly) or the RX and battery on PNF (Plug and Fly) models. Often (especially with cheaper models) however, you might find that there are loose or even missing screws and that there has been no “thread locker” used. (Thread Locker is a product that stops screws from coming loose. Red thread locker is to permanently lock a screw in place, the blue thread locker makes a screw act like a “NyLock Nut” so it will not loosen due to vibration.)
A prebuilt model should be OK to connect a battery (or 5v from the USB) to it straight out of the box, but some “Health and Safety” types might prefer to check their models for shorts first!
10 PHYSICAL CHECKS YOU SHOULD CARRY OUT ON YOUR PRE-BUILT MODEL
- Make sure that all the required screws are present.
- Check that wiring is clean, the insulation is free from cuts, marks or scratches, and that there are no obvious soldering problems.
- Ensure that the motors wires are not too tight, that they are not pinched by standoffs, and that there are no sharp CF (Carbon Fiber) edges that may compromise the integrity of the wire insulation.
- Wipe the edges of the frame with a cloth (you really don’t want a carbon fiber splinter) to check for strands or carbon, and sand / file any rough edges. (This is best done under water, CF dust is very harmful to the lungs.)
- Make sure that there is no physical contact between the frame and any of the electrical components. CF is electrically conductive and can cause short circuits.
- Remove one or two motor mount screws to check whether they have “thread locker”, if not – it is advisable to remove all the motor screws and apply some Blue thread locker yourself. If your motors are soft monted, do not over tighten them otherwise it defeats the object.
- Check that the motor grub screws are in place and tight, you may wish to apply blue thread locker to these too.
- Check the standoff screws are all tight, you may wish to check and apply blue thread locker here as well.
- Check your VTX antenna is properly connected and that it, and the camera, are transmitting an image on the correct channel for your goggles. At this point you can check your camera settings are suitable for the conditions you will be flying in. (Note: Some VTX are able to run on the 5v provided by a USB connection, others require that you connect a battery.)
- Check your VTX power is not breaking local restrictions and (if you can) configure your VTX to startup in “pit” mode, so if you are flying with others, you don’t interfere with their video feed when you connect your battery.
10 THINGS TO CHECK IN BETAFLIGHT CONFIGURATOR
Remember that connecting to a USB provides 5v to your flight controller, this may power up your VTX. You can burn out your VTX by providing power without an antenna connected!
- Remove your propellers!
- Confirm that the FC (Flight Controller) is recognised by your PC.
- Download the newest version of BFC (BetaFlight configurator)
- Using “Firmware Flasher” in BetaFlight configurator, update the FW (FirmWare) for your FC to the latest stable version. Remember that updating your FW will reset to BetaFlight defaults. Some RTF and pre-built models have settings applied by the manufacturer. Before you update, go into the BFC “CLI” tab and type “diff” (without quotation marks), this will display all the settings that have been changed from the defauls. You can then save this info to a file so you can re-apply the manufacturers settings to the new FW version.
- Bind your TX (Radio Transmitter) and RX (receiver). (This can be done at any stage.)
- If you are using a newer digital “Serial” receiver, ensure that the correct UART in the “Ports” tab has the “Serial RX” slider activated. Confirm that the correct receiver type and RX protocol are selected in the “Configuration” tab, and check that the sliders in the “Receiver” tab are showing your stick inputs on the correct channels.
- Check that the ESC protocol (ie. DShot 600) shown in the configuration tab is correct for the ESC’s you are using.
- Assign switches (AUX channels) in the “Modes” tab to “Arm” and change “Flight Modes” (ie. Angle mode, Horizon mode and Acro mode) and Sub modes (ie. Anti-Gravity and Air-Mode). Confirm that the pip beneath the mode slider moves with your switch input.
- Setup “Failsafe”, go to the “Receiver” tab, apply throttle and confirm the slider increases, then turn off your transmitter and check to see if the throttle drops back to 0%.
- At this point you really MUST remove the props, and you should always setup failsafe before continuing with this! While connected to Betaflight configurator, connect the battery. Go to the “Motors” tab of BetaFlight, check the “propellers are removed” box and check each individual motor is rotating in the correct direction, while you are doing this you can also check the motors are running smoothly and with minimal vibration. Brushless motors can reverse the rotational direction with FW commands using BLHeli Configurator. (Using the BLHeli configurator, you can also update your ESC’s to the latest FW version.) Brushed motors rotating in the wrong direction need to have the polarity reversed. Remember the brushes in brushed motors are optimised to rotate in either CW or CCW direction but not both.
This list is not exhaustive and I am sure that there are other things that people may wish to add, but following these steps should help your maiden flight successful and keep downtime to a minimum!
- Drone Pipeline Inspections in Oil and Gas Industry - November 23, 2023
- Wind Turbine Inspection using Drones - November 16, 2023
- Agriculture Drone Mapping: Data-Driven Decisions - October 29, 2023